1. RTAB-Map 설치
bash
닫기sudo apt install ros-$ROS_DISTRO-rtabmap-ros sudo apt install ros-$ROS_DISTRO-rmw-cyclonedds-cpp
~/.bashrc 또는 ~/.zshrc 에 추가
bash
닫기## RTAB-Map's logging with RCLCPP's logs export RCUTILS_LOGGING_USE_STDOUT=1 export RCUTILS_LOGGING_BUFFERED_STREAM=1 # Optional, but if you like colored logs: export RCUTILS_COLORIZED_OUTPUT=1 ## RTAB-Map's GUI with Cyclone DDS export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
2. RTAB-Map 시뮬레이션
아래의 명령어들은 터미널 창을 각각 띄워 실행시킨다.
2.1 RTAB-Map 실행
bash
닫기export TURTLEBOT3_MODEL=waffle ros2 launch rtabmap_demos turtlebot3_sim_scan_demo.launch.py
다른 데모는 https://docs.ros.org/en/humble/p/rtabmap_demos/index.html 에서 확인할 수 있다.
2.2 Keyboard Teleoperation
bash
닫기export TURTLEBOT3_MODEL=waffle ros2 run turtlebot3_teleop teleop_keyboard

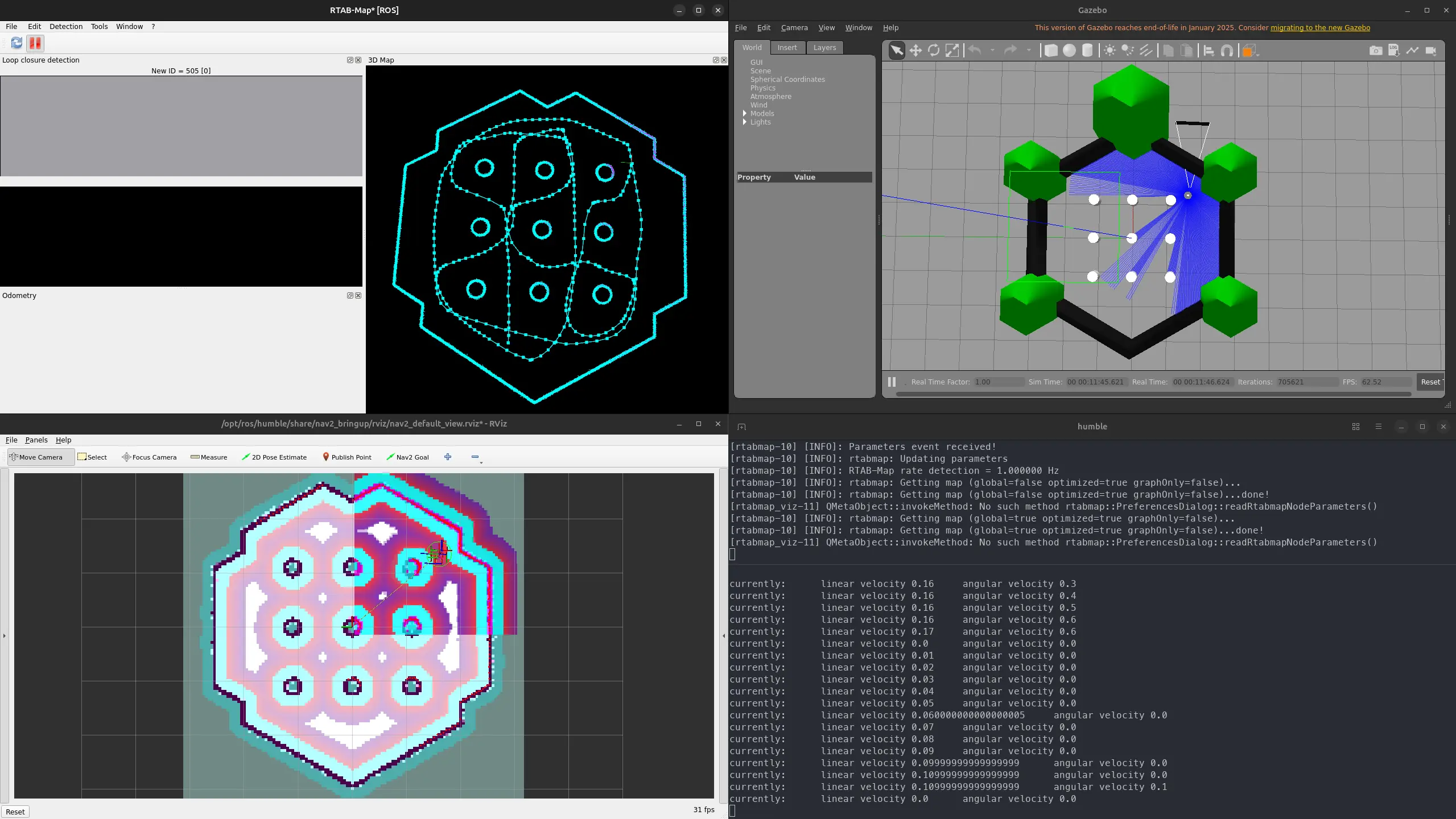
3. 시뮬레이션 결과
3.1 Mapping
3.2 Localization